Using Observation Groups In GeoLab
Overview
This article describes the various options and formatting requirements for groups of observations in GeoLab. The different types of observation groups covered are:
2DC: 2D Coordinate Observation Groups;
2DD: 2D Coordinate Difference Observation Groups;
3DC: 3D Coordinate Observation Groups;
3DD: 3D Coordinate Difference Observation Groups;
DSET: Direction Observation Groups.
General Layout of Observation Groups
All observation groups should begin with a GRP record, which effectively names the group of measurements.
The group name has no effect on the network adjustment, but it simplifies the revisions to your IOB file when residuals are flagged in the output listing.
The observations named by a GRP record are all of those measurements following that GRP record, up to the next GRP record encountered.
Constructing Group Names
The name specified in a GRP record can be used to locate measurements in an IOB file that correspond to residuals listed in the output listing (*.LST) file.
When residuals are listed, the GRP "name" (the text in a GRP record) is also output with those residuals.
It is therefore easier for you to find measurements contained by a group, if the GRP record name contains the following:
An indication of which IOB file the measurements are in (e.g. a file name, or a project name); and
A sequence or other number that indicates where in the file to find the measurements in the group.
Group Structure
The general structure of observation groups is as follows (please note that we will use square brackets, [], to enclose a description of a group of one or more records):
GRP Observation Group 001
[Observations in Group 001]
GRP Observation Group 002
[Observations in Group 002]
and so on...
Layout of 2DC, 2DD, 3DC, and 3DD Groups
The general layout of records for the 2DC, 2DD, 3DC, and 3DD observation groups is as follows:
[Header record (2DC, 2DD, 3DC, or 3DD)]
[Set of measurement value records]
[Covariance matrix header record]
[Matrix elements records]
The "Covariance matrix header record" and the "Matrix elements records" have the same format for all types of header records (2DC, 2DD, 3DC, and 3DD), so we will cover their formatting next.
Covariance Matrix Formatting
The formatting of records for the "covariance matrix" of 2DC, 2DD, 3DC, and 3DD groups of observations depends on the form of covariance information you have for the observation group.
The most common type of covariance matrix data provided for coordinate and coordinate difference measurements are the actual elements of a covariance matrix (in which case you use a COV matrix header record). Other forms supported are weight matrix elements (WGT header record), correlation matrix elements (CORR header record), or you can generate a covariance matrix (e.g. for simulations) using the GENC header record (which requires no ELEM records).
The size of the matrix (which determines the number of ELEM records in the "Matrix elements records" section) is determined by the number N of records in the "Set of measurement value records" as shown in the following table.

For example, if we have the following three (N = 3) sets of coordinate difference observations:
Station 1 to station 2: d1 = X2 -X1; d2 = Y2 -Y1; d3 = Z2 -Z1;
Station 2 to station 3: d4 = X3 -X2; d5 = Y3 -Y2; d6 = Z3 -Z2;
Station 3 to station 1: d7 = X3 -X1; d8 = Y3 -Y1; d9 = Z3 -Z1;
for a total of nine observations (3 sets of dX, dY, and dZ), we would input them in three DXYZ records as follows:
3DDDXYZ 1-2 d1 d2 d3DXYZ 2-3 d4 d5 d6DXYZ 3-1 d7 d8 d9
If we denote a covariance matrix element as sij (where s11 is the variance of d1, and s12 is the covariance between d1 and d2, etc.), the upper-triangular portion of the covariance matrix for these observations is as follows (note that the order of the covariance elements depends only on the order in which the observations are given as DXYZ records):

The COV and ELEM records for this observation would therefore be:

As you can see, the general approach is to start the entry of each row of the upper triangular portion of the matrix with a new ELEM record, and you use as many ELEM records as required for the elements of each row (an ELEM record can hold up to three elements).
For the UPPR matrix form, each row is entered starting with the diagonal element. For the DIAG matrix form, you simply enter the diagonal elements (three at a time) in ELEM records from the upper-left element to the lower-right element.
The structure of the ELEM records is similar when you use the WGT matrix header (except, of course, weights are entered instead of covariances).
The structure of the ELEM records is slightly different when you use the CORR matrix header record. In this case the diagonal elements must always be 1.0, and the off-diagonal elements are the correlation coefficients. Immediately following these elements, you must also provide ELEM records that specify the standard deviations of the coordinate or coordinate difference measurements. If the matrix size is N, then N standard deviations must be entered in as many ELEM records as required (an ELEM record can only contain up to three elements).
2DC: 2D Coordinate Observation Groups
The format for a 2D coordinate observation group is as follows (the use of the optional sigma-ID is described below):
2DC [optional sigma ID]
[Set of 2D coordinate records]
[Covariance matrix header record]
[Matrix elements records]
The "Set of 2D coordinate records" must contain only PL, NE, or XY coordinate records. It may also contain HI, HT, 4PAR, and 7PAR records.
2DD: 2D Coordinate Difference Obs Groups
The format for a 2D coordinate difference observation group is as follows:
2DD [optional sigma ID]
[Set of 2D coordinate records]
[Covariance matrix header record]
[Matrix elements records]
The "Set of 2D coordinate records" must contain only PL, NE, or XY coordinate
records (it may also contain HI, HT, 4PAR, and 7PAR records). GeoLab will
automatically subtract the first of these records from the others to arrive at the
actual coordinate difference measurement values. Note that the covariance matrix
elements entered must correspond to these computed coordinate differences.
3DC: 3D Coordinate Observation Groups
The format for a 3D coordinate observation group is as follows:
3DC [optional sigma ID]
[Set of 3D coordinate records]
[Covariance matrix header record]
[Matrix elements records]
The "Set of 3D coordinate records" must contain only PLH, PLO, NEH, NEO, or XYZ coordinate records (it may also contain HI, HT, 4PAR, and 7PAR records).
3DD: 3D Coordinate Difference Obs Groups
The format for a 3D coordinate observation group is as follows:
3DD [optional sigma ID]
[Set of 3D coordinate records or DXYZ records]
[Covariance matrix header record]
[Matrix elements records]
The "Set of 3D coordinate records or DXYZ records" must contain only PLH, PLO, NEH, NEO, XYZ coordinate records, or DXYZ coordinate difference records (it may also contain HI, HT, 4PAR, and 7PAR records).
If DXYZ records are not used, GeoLab will automatically subtract the first of these records from the others to arrive at the actual coordinate difference measurement values (in which case the covariance matrix elements entered must correspond to these computed coordinate differences).
Using the Covariance Matrix Header Record and Sigma Records
Each coordinate and coordinate-difference obs group header record (2DC, 2DD, 3DC, and 3DD) takes an optional "sigma ID". A "sigma-ID" refers to a previously given SIGM record. The elements of the sigma-record are used in these groups of measurements as follows:

Note that if centering errors are used in the sigma-record, the covariance matrix coordinate system must be LG (local geodetic).
The covariance matrix header record can be one of the following record types:

The "matrix revision" fields of the matrix header (COV, CORR, GENC, and WGT) are:
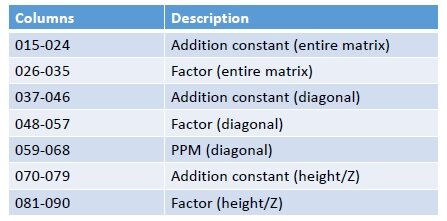
For the GENC matrix header, all elements of the covariance matrix are initially set to zero before the following revisions are made. For all other matrix header types, the elements of the covariance matrix are initially given (either directly or indirectly) by the ELEM records.
The "Addition constant (entire matrix)" and the "Addition constant (diagonal)" are first added directly to the covariance matrix. The "PPM (diagonal)" value is used to calculate a standard deviation (using either a geocentric radius for 2DC and 3DC groups, or the vector lengths for 2DD and 3DD groups) and that value is squared and added to the diagonal of the covariance matrix.
Next, for 3DC and 3DD groups, the "Addition constant (height/Z)" and "Factor (height/Z)" values are used to revise the covariance matrix. If the matrix coordinate system is CT, then the Z or Z-difference diagonal elements are revised. If the matrix coordinate system is LG then the height or height-difference diagonal elements are revised.
The revision is performed as follows (E denotes the current matrix element, A the "Addition constant (entire matrix)" value, and F the "Factor (height/Z)" value: E = (E + A) * F. Finally, the "Factor (entire matrix)" and the "Factor (diagonal)" are applied to the covariance matrix.
DSET: Direction Observation Groups
A (horizontal) direction set must be in the following format:
DSET [optional sigma ID]
[Set of DIR observation records]
Each DIR record in a DSET must have the same from-station specified.
If a sigma-record is used for a DSET, the standard deviation, the from-centering, and to-centering values are used to modify or define the standard deviations of the direction measurements in the DSET group.